通过认证
通过认证
“瑞士Bluebotics激光导航AGV叉车定位模块”详细介绍
机器人,或者自动导引小车(AVGs),可用于托盘定位、高层码跺、货物传输、以及各种各样的其它应用领域,传统的路径定义方法往往有赖于昂贵的固定式外界矫正装置,比如地板下的感应线、反射体、遥控操作或者示教等等。这些方法都强迫机器始终处于事先定义好的运行轨迹之上,其主要不足之处在于无法应对预定义路径上可能出现的意外障碍。尽管大多数系统都可以避免碰撞,BlueBotics SA公司还是开发出来一种更好的方法,即自主导航技术(ANT®),该公司源于瑞士联邦理工学院洛桑分校。  Bluebottle公司开发的导航系统由多个部分组成,工作环境"地形图"采用一种类似于图的数据结构,其中的节点表示AGV执行的任务中所必须到达的各个位置。"地形图"含有环境的特征信息,可供机器人用于计算自己的当前位置,以及需要到达的目标点。 路径规划和运动算法工作于不同的抽象层面,可依据读取信息分为两个层面:轨迹跟踪和实时路径规划,这可以确保操作者选取一个速度,以允许机器人在撞上明显的障碍物之前就能够停下来。 作为一种选择,BlueBotics公司还提供了一种导航功能,可根据机器人周边的虚拟坐标网格提取传感器读数。该功能基于"橡皮筋"概念,本质上是以实时形变获取短小而平顺的路径,以保持和障碍物的间隔,从而允许AGV避开动态障碍。万一障碍物变得足以破坏AGV路径沿线的最小允许间隔,可调用该导航功能重新规划路径。
Bluebottle公司开发的导航系统由多个部分组成,工作环境"地形图"采用一种类似于图的数据结构,其中的节点表示AGV执行的任务中所必须到达的各个位置。"地形图"含有环境的特征信息,可供机器人用于计算自己的当前位置,以及需要到达的目标点。 路径规划和运动算法工作于不同的抽象层面,可依据读取信息分为两个层面:轨迹跟踪和实时路径规划,这可以确保操作者选取一个速度,以允许机器人在撞上明显的障碍物之前就能够停下来。 作为一种选择,BlueBotics公司还提供了一种导航功能,可根据机器人周边的虚拟坐标网格提取传感器读数。该功能基于"橡皮筋"概念,本质上是以实时形变获取短小而平顺的路径,以保持和障碍物的间隔,从而允许AGV避开动态障碍。万一障碍物变得足以破坏AGV路径沿线的最小允许间隔,可调用该导航功能重新规划路径。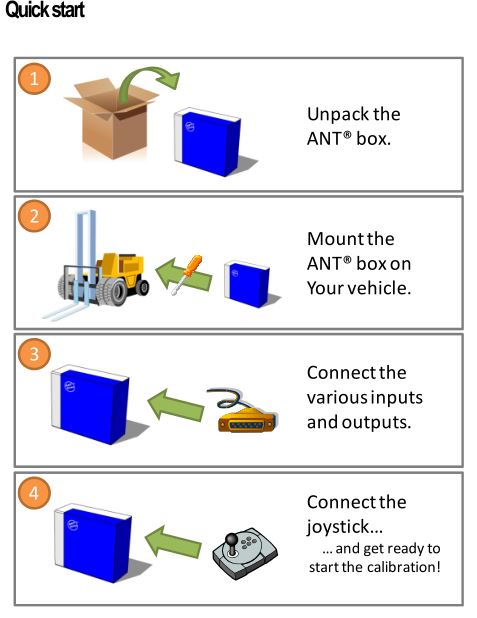
 本手册是指ANT®本地化和ANT®定位+产品,有相同的机械和电气接口,他们将被简单地称为ANT®。手动处理车辆供应商谁将ANT®集成到一个自动引导车(AGV)。它还向负责安装AGV onsite、维修和维护AGV的人员进行了处理。本手册描述了如何集成和安装ANT®车辆由一个线性和旋转速度(v,ω)
本手册是指ANT®本地化和ANT®定位+产品,有相同的机械和电气接口,他们将被简单地称为ANT®。手动处理车辆供应商谁将ANT®集成到一个自动引导车(AGV)。它还向负责安装AGV onsite、维修和维护AGV的人员进行了处理。本手册描述了如何集成和安装ANT®车辆由一个线性和旋转速度(v,ω)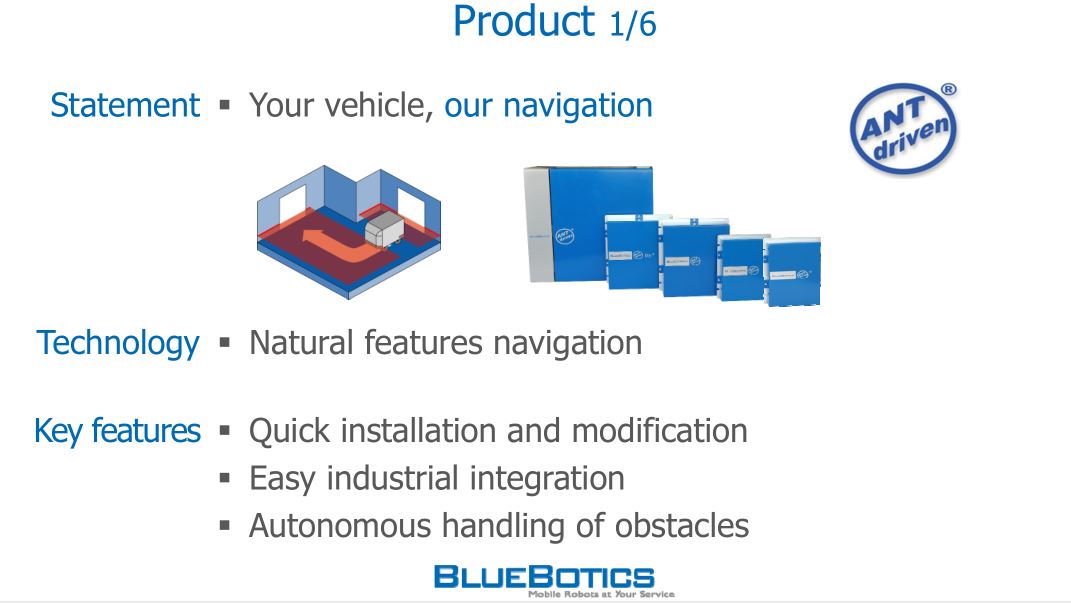 ANT®系统包含以下组件:•ANT®盒子•配置电缆安装在AGV3.1固定的部件参考图2的尺寸ANT®。一个3D模型可以在请求中使用。用四个M4螺丝ANT®系统。图2:ANT®机械尺寸和安装螺丝。重量:0.6公斤3.2冷却蚂蚁®的冷却是通过铝基板,高热量消散的盒子(传导冷却)。铝基板必须安装在你汽车的金属表面上。3.3环境条件•操作温度:+ 0…+ 60°C•储存温度:-25…+ 85°C•相对湿度:5% - 95%,不凝结•保护盒:IP30(无灰尘,无水)3.4激光扫描仪的位置激光扫描仪的安装位置对ANT®的准确性很重要。•传感器水平状态(地面参考):+ / - 1°所有传感器的位置:在相同的高度:+ / - 2厘米在操作过程中,传感器不能“看到”水平面上的地面。我们建议使用标准传感器安装支架来进行简单的传感器维护。
ANT®系统包含以下组件:•ANT®盒子•配置电缆安装在AGV3.1固定的部件参考图2的尺寸ANT®。一个3D模型可以在请求中使用。用四个M4螺丝ANT®系统。图2:ANT®机械尺寸和安装螺丝。重量:0.6公斤3.2冷却蚂蚁®的冷却是通过铝基板,高热量消散的盒子(传导冷却)。铝基板必须安装在你汽车的金属表面上。3.3环境条件•操作温度:+ 0…+ 60°C•储存温度:-25…+ 85°C•相对湿度:5% - 95%,不凝结•保护盒:IP30(无灰尘,无水)3.4激光扫描仪的位置激光扫描仪的安装位置对ANT®的准确性很重要。•传感器水平状态(地面参考):+ / - 1°所有传感器的位置:在相同的高度:+ / - 2厘米在操作过程中,传感器不能“看到”水平面上的地面。我们建议使用标准传感器安装支架来进行简单的传感器维护。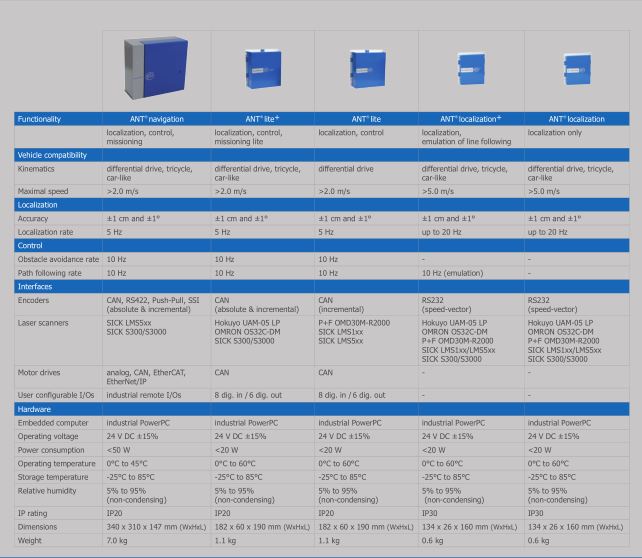 进版本,原技术曾以11型RoboX全自主"旅行向导"机器人的形式在2002年瑞士国际博览会展出,参展期间多台机器人共累计航行达13,000小时,导向工作里程大约为1,800英里。 为支持完全自主导航,BlueBotics公司的ANT方法需通过多种传感器搜集数据,传感器包括车轮编码器、激光扫描仪和触觉传感器等,加上对传感器数据的实时计算和处理,该技术就可以提供高水平的自主导航,并兼顾高精度定位能力。
进版本,原技术曾以11型RoboX全自主"旅行向导"机器人的形式在2002年瑞士国际博览会展出,参展期间多台机器人共累计航行达13,000小时,导向工作里程大约为1,800英里。 为支持完全自主导航,BlueBotics公司的ANT方法需通过多种传感器搜集数据,传感器包括车轮编码器、激光扫描仪和触觉传感器等,加上对传感器数据的实时计算和处理,该技术就可以提供高水平的自主导航,并兼顾高精度定位能力。
Bluebottle公司开发的导航系统由多个部分组成,工作环境"地形图"采用一种类似于图的数据结构,其中的节点表示AGV执行的任务中所必须到达的各个位置。"地形图"含有环境的特征信息,可供机器人用于计算自己的当前位置,以及需要到达的目标点。 路径规划和运动算法工作于不同的抽象层面,可依据读取信息分为两个层面:轨迹跟踪和实时路径规划,这可以确保操作者选取一个速度,以允许机器人在撞上明显的障碍物之前就能够停下来。 作为一种选择,BlueBotics公司还提供了一种导航功能,可根据机器人周边的虚拟坐标网格提取传感器读数。该功能基于"橡皮筋"概念,本质上是以实时形变获取短小而平顺的路径,以保持和障碍物的间隔,从而允许AGV避开动态障碍。万一障碍物变得足以破坏AGV路径沿线的最小允许间隔,可调用该导航功能重新规划路径。
ANT——高效的移动机器人的关键
ANT®是一个智能组件,使自动引导车辆、平台或机器人找到和导航在已知的独立空间,而不需要任何额外的基础设施。他们使用周围的自然特性来确定他们在哪里,他们在准确的目的地,巧妙地避免任何障碍。他们的核心被传感器从编码器和pre-fitted安全激光扫描仪结合数据,实现精度±1厘米。本手册是指ANT®本地化和ANT®定位+产品,有相同的机械和电气接口,他们将被简单地称为ANT®。手动处理车辆供应商谁将ANT®集成到一个自动引导车(AGV)。它还向负责安装AGV onsite、维修和维护AGV的人员进行了处理。本手册描述了如何集成和安装ANT®车辆由一个线性和旋转速度(v,ω)ANT®系统包含以下组件:•ANT®盒子•配置电缆安装在AGV3.1固定的部件参考图2的尺寸ANT®。一个3D模型可以在请求中使用。用四个M4螺丝ANT®系统。图2:ANT®机械尺寸和安装螺丝。重量:0.6公斤3.2冷却蚂蚁®的冷却是通过铝基板,高热量消散的盒子(传导冷却)。铝基板必须安装在你汽车的金属表面上。3.3环境条件•操作温度:+ 0…+ 60°C•储存温度:-25…+ 85°C•相对湿度:5% - 95%,不凝结•保护盒:IP30(无灰尘,无水)3.4激光扫描仪的位置激光扫描仪的安装位置对ANT®的准确性很重要。•传感器水平状态(地面参考):+ / - 1°所有传感器的位置:在相同的高度:+ / - 2厘米在操作过程中,传感器不能“看到”水平面上的地面。我们建议使用标准传感器安装支架来进行简单的传感器维护。进版本,原技术曾以11型RoboX全自主"旅行向导"机器人的形式在2002年瑞士国际博览会展出,参展期间多台机器人共累计航行达13,000小时,导向工作里程大约为1,800英里。 为支持完全自主导航,BlueBotics公司的ANT方法需通过多种传感器搜集数据,传感器包括车轮编码器、激光扫描仪和触觉传感器等,加上对传感器数据的实时计算和处理,该技术就可以提供高水平的自主导航,并兼顾高精度定位能力。